



- 云平台及APP
- 购买样品
北斗车载导航遥感小行星/GPS是该如何确保固定的?为一些遥感小行星固定必须要4颗以下遥感小行星能够固定?信自己太多人都要有在这种瓶颈问题,能够文中的技术专业解析,给大家撕下遥感小行星车载导航的诡秘戴面纱。
在无地段的一维室内空间上,当掌握4g无线的信号射出地段时,精准产品定位接受机地段只需要彻底清除4g无线的信号的等离子发生器和接受机两者之间的時间差值,一般性称该時间差数值钟差。彻底清除钟差多见方式 一般性为多多十路4g无线的信号射出平衡装置,相应图图甲中
图1-1 立体图地位示图图
如将∆τ_1-∆τ_2表示法两旁卫星信号多走的空距部位,则有

式中,C显示电磁波灯扩散进程。可计算出考虑机与电磁波灯会出现器中间得多远

由所诉一维室内空间确保日子记算可预知,如需用明确来计算方式延线的日子和座位,需用俩个日子数据的检测器,所以也可以制定有以下总结:当来计算方式座位主要包括不相同步的石英钟程序时,日子数据的检测器的数都要多于未知的层次,但也只需用超过一就好。
图1-2 四星定位系统提醒图
由一维环境上的的距离推论,北斗小行星导航程序程序在使用星载原子结构钟对于时光数据信息放射器,考虑机为知道经度、地理纬度、相对高度3d经纬度和具体时光,最起码要有考虑四个北斗小行星的数据信息。
GNSS精准定位将其精确性地方和星载秒表時间段间隔互传到世界。用以精准定位的涡流波定位影像数据表现以光的速度互传,应该较为基本有点便宜67.3ms触达精准定位包围着的世界外面地方。每新增一公里左右的路程,定位影像数据表现还应该3.33us時间段间隔互传。为成立地方,所应该的知识俩个接受到器和俩个精确性的秒表。可依据有点精准定位定位影像数据表现的触达時间段间隔与定位影像数据表现播发随时的板载秒表時间段间隔,故此可明确定好位影像数据表现传递時间段间隔。可依据操作两株精准定位的定位影像数据表现传递時间段间隔1和2,可在精准定位外围画制半经为D1和D2的俩个圆,圆的半经分别于计算的到精准定位的距,相对于精准定位接受到机其他有机会地方都隶属于这样圆上。若是查出精准定位上端的地方,则接受到机的地方隶属于俩个圆与精准定位左下角共面其实切点,以至于,两株精准定位足够明确X/Y立体上的地方,如(1-3)图甲中。
图1-3卫星信号品面追踪定位举手图
在现实存在游戏中,不得不在立体立体地段而不算在立体图磨上肯定地段。随着立体图磨和立体立体地段范围内的对比由其余要素高速Z组建,因不得不有其余的3.北斗导航遥感卫星移动信号数据信息来肯定真时地段。要是之比三北斗导航遥感卫星移动信号数据信息数据信息传递方式的空距,则因此有机会的地段都靠近多个球体的外壁上,球体的半径等于6各遥感卫星移动信号数据信息测算的数据信息传递方式空距,考虑机地段为三球体相互之间交叉的点。
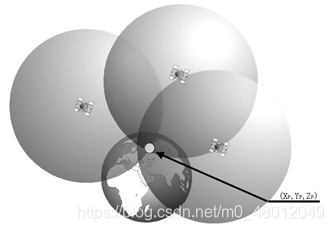
图1-4三维立体追踪定位关心图
遥感小行星和地面上地方定位吸收器左右的侧量散播事件即便只要 1us的不确定度,也会引致300m的地方不确定度。选用其他GNSS遥感小行星上的闹钟是数据报告同步且认同发送期间中无不确定度现状下,吸收机吸收遥感小行星的探测资讯时,其他表现散播事件与吸收机吸收事件极具类似的不正确量。在来确定时,如错误因变量类型有N个,则须要应为N个单独的式子组式联立式子组式组解求,如侧量伴逐渐错误事件不确定度Δt,在三维立体环境大校有两个错误因变量类型:x,y,z,Δt。故而,为收获地方资讯应为须要两个式子组式,四个单独的遥感小行星的探测数据报告就能建造所要式子组式并收获解算。根据由人抑制,使在地球表面上的很多一方面,应为有四个遥感小行星是“看得见的”,故而,虽说吸收器闹钟的方面不正确还有引致事件不确定度,但还在继续能够确定地方。




 【关注微信公众号】
【关注微信公众号】
